Добрый день, уважаемые коллеги!
Тема немного затихла. Придется "освежить" ее своей некомпетентностью и огромным любопытством.
Вопрос не совсем релейный. Дело в том, что я занимаюсь исследованиями применения синхронизированных векторных измерений (PMU-измерений) в таких задачах как оценивание состояния ЭЭС, достоверизация (обнаружение грубых ошибок телеизмерений) и других прикладных задачах.
В настоящее время обдумываю возможность создания модели PMU в Matlab. Для обработки смоделированных измерений мной уже написаны в Matlab программы. Но конкретно в моделировании устройств опыта не имею. Поэтому в голове полная каша. Надеюсь, что кто-то направит в "правильное русло".
Для начала не могу понять, что же должна из себя представлять модель данного устройства:
1 вариант: аналоговые входы, антиалиасинговые фильтры, АЦП, ДПФ, цифровая фильрация, вычисление действующих значений по формулам производителей;
2 вариант: измерительный тракт моделировать упрощенно применив какие-либо стандартные/ либо не стандартные фильтры Matlab.
Думаю что смоделировать полноценный измерительный тракт не так-то просто и есть ли в этом смысл для мои задач?
Или это основное и без него такая модель не представляет интереса для исследований?
Или есть какой-то другой вариант? Что должна содержать модель PMU.
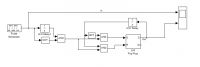
Проанализировав зарубежную литературу, нашел вот такую модель PMU:
 http://rzia.ru/extensions/hcs_image_uploader/uploads/50000/5000/55201/thumb/p184gguoknmc4eep1mfl1m7m194q2.JPG
http://rzia.ru/extensions/hcs_image_uploader/uploads/50000/5000/55201/thumb/p184gguoknmc4eep1mfl1m7m194q2.JPG
Насколько адекватна такая модель? что может содержать блок subsystem? АЦП и фильтры? Судя по модели, здесь выполнен прием сигналов тока и напряжения, разложение на гармоники или это просто пофазная обработка?, какое-то преобразование, вычисление действующего значения, преобразование комплекса в показательную форму, перевод угла из радиан в градусы и суммирование сигналов. Правильно ли я понимаю эту блок-схему?
Нашел также рекомендации по моделированию в РЭ PMU Российского производства, они довольно краткие:
 http://rzia.ru/extensions/hcs_image_uploader/uploads/50000/5000/55201/thumb/p184gev99d16bssblsp413gu19ub2.JPG
http://rzia.ru/extensions/hcs_image_uploader/uploads/50000/5000/55201/thumb/p184gev99d16bssblsp413gu19ub2.JPG
Не могу понять куда что "прилепить"? Для чего мне создавать входной сигнал? Описан фильтр, но внизу сказано, что такая модель не очень точна. Пока больше вопросов чем ответов.
Также пока неясно как моделировать погрешность прибора? как и шум - функцией нормального распределения с заданной дисперсией, вычисленной через класс точности?
Также пока не ясен учет точного времени (GPS-синхронизации) в модели, нужен или нет? или достаточно одновременного пуска всех устройств PMU при моделировании.
Буду благодарен любому совету или подсказке, кроме "брось эту дурную затею". Возможно кто-то сможет поделиться моделью измерительного устройства или измерительного тракта.